时域分析
时域瞬态响应
时间响应,在数学上就是系统动力学方程的解
一阶系统
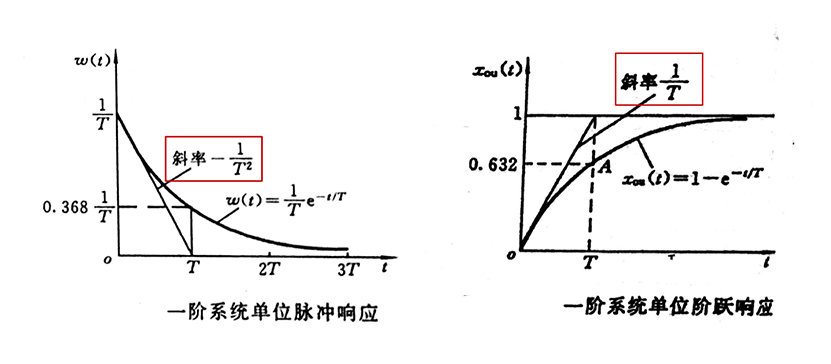
$t_s$为调整时间$3T\to 95\%,4T\to98\%$
一阶系统在阶跃输入下达到稳态的 $(1-\Delta)$ 时所用的时间 ( $\Delta$ 为容许误差)
$t_s$ 反应系统的快速性,T越大,调整时间越大,响应速度越慢
二阶系统
对 $G(s)=\frac{\omega_n^2}{s^2+2\xi\omega_n s+\omega_n^2}$ 来说:
特征方程:${s^2+2\xi\omega_n s+\omega_n^2}$
特征根:$s=\xi\omega_n\pm\omega_n\sqrt{1-\xi^2}$
- $\omega_n$ 为无阻尼固有频率,令 $\omega_d=\omega_n\sqrt{1-\xi^2}$ ,称为有阻尼固有频率
- $\xi=0$ ,系统为无阻尼系统,等幅振荡
- $0<\xi<1$ ,系统为欠阻尼系统,振荡收敛
- $\xi=1$,系统为临界阻尼系统,不振荡收敛
- $\xi>1$ ,系统为过阻尼系统,不振荡收敛

上升时间$t_r$ :系统第一次到达稳态的时间
峰值时间$t_p$:系统第一次到达峰值的时间
最大超调量$M_p$:(峰值 - 稳态)/峰值%
调整时间$t_s$,当 $0<\xi<0.7$ 时
- $\xi$ 主要与震荡性(稳定性)正相关,$\omega_n$ 主要与快速性正相关。
- 系统的响应速度往往与震荡性能之间是矛盾的
稳态响应
对于一阶惯性系统,输入正弦信号$\sin(\omega t)$
分解
根据时移特性拉氏反变换,得到
所以稳态之后的信号也为正弦,幅值和相位的求法是把$s=j\omega$带入传递函数
从而有时频特性和相频特性
频域分析
乃氏图
根据上面的每个$\omega$的幅值和相位可以确定一个点,绘制纵$0\to \infty$的曲线即为奈奎斯特图。
绘制
用极限的方法
或者复数相乘,模相乘辐角相加原理,用常见的叠加得到
伯德图
即对数坐标图,纵坐标取对数,横坐标采用10倍频程比值缩放$\text{(dec)}$
(坐标轴仍任显示原值,只是计算斜率时使用)
斜率
绘制
可以直接用斜率近似计算,也可以利用
直接计算关键点
常见的环节
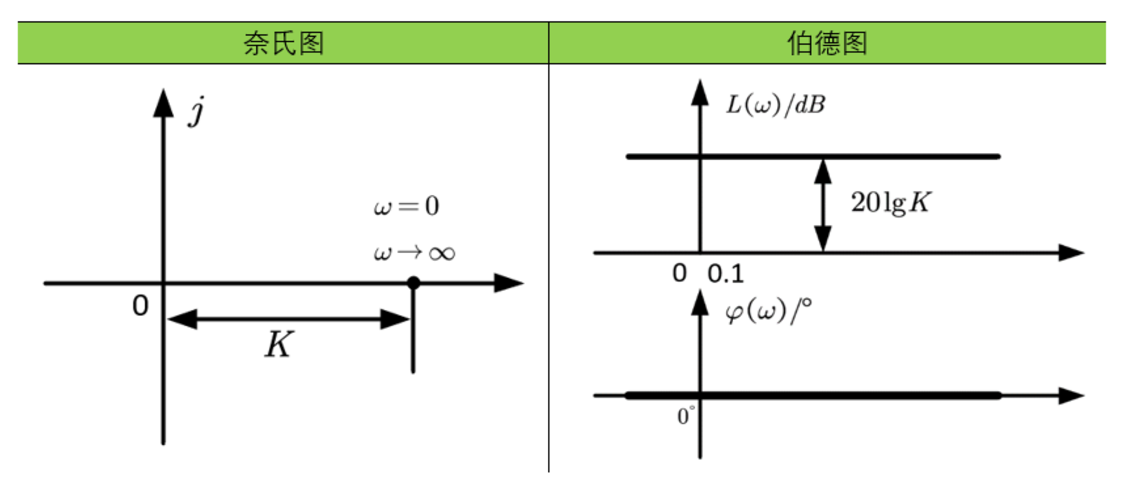
比例环节
比例环节的频率特性是与频率无关的常数,在奈奎斯特图上表现为实轴上一个点,在伯德图中表现为与频率无关的两条直线
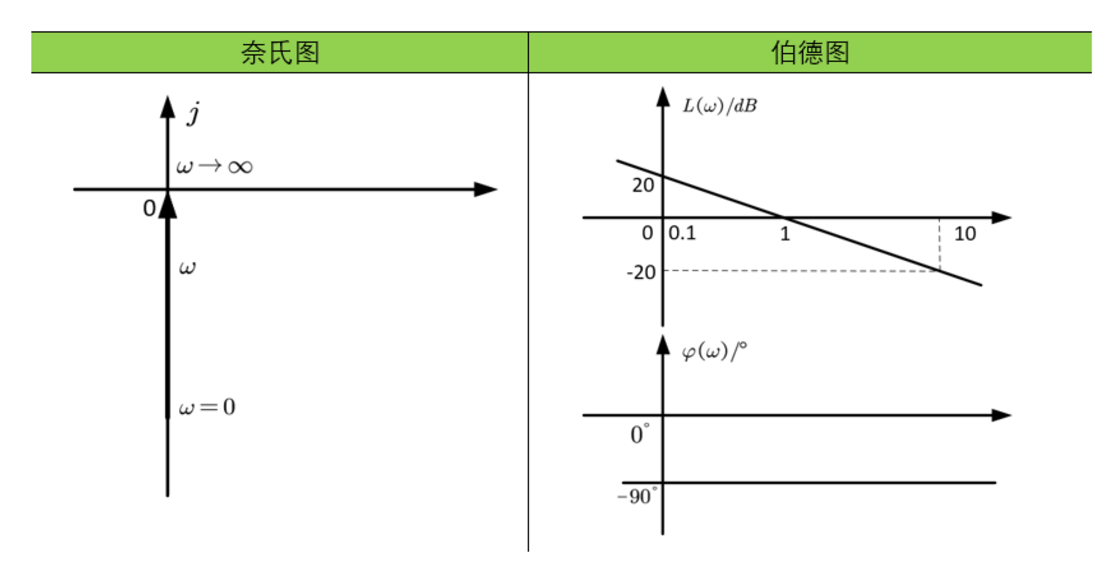
积分环节
积分环节的输出量是其输入量对时间的积分。奈奎斯特图是虚轴上从负无穷到原点的一条直线,相角恒为$-90^\circ$。对数幅频特性是一条$[-20]$斜率的直线,相角保持$-90^\circ$不变。
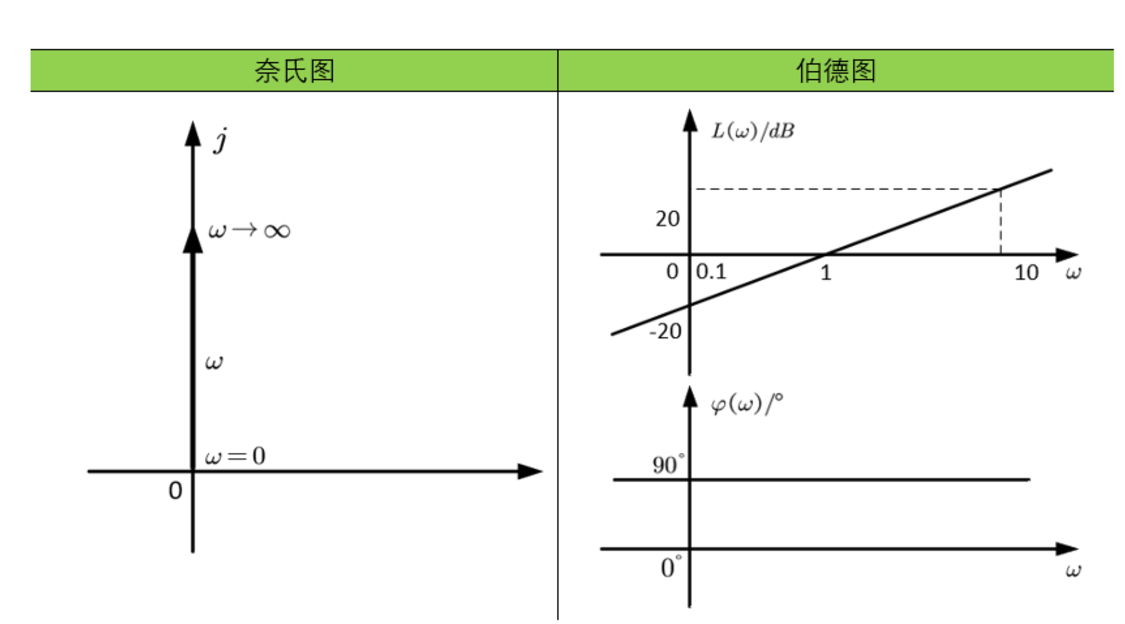
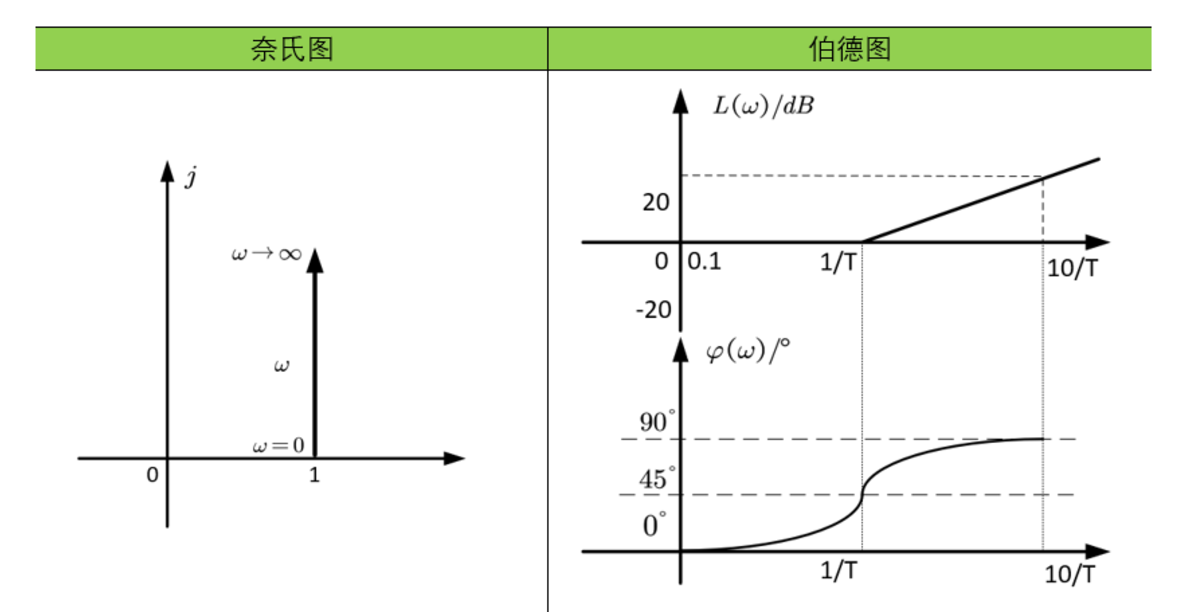
微分环节
微分环节的输出量是其输入量对时间的微分。奈奎斯特图是虚轴上从原点到正无穷的一条直线,相角恒为90°。对数幅频特性是一条$[+20]$斜率的直线,相角保持90°不变。
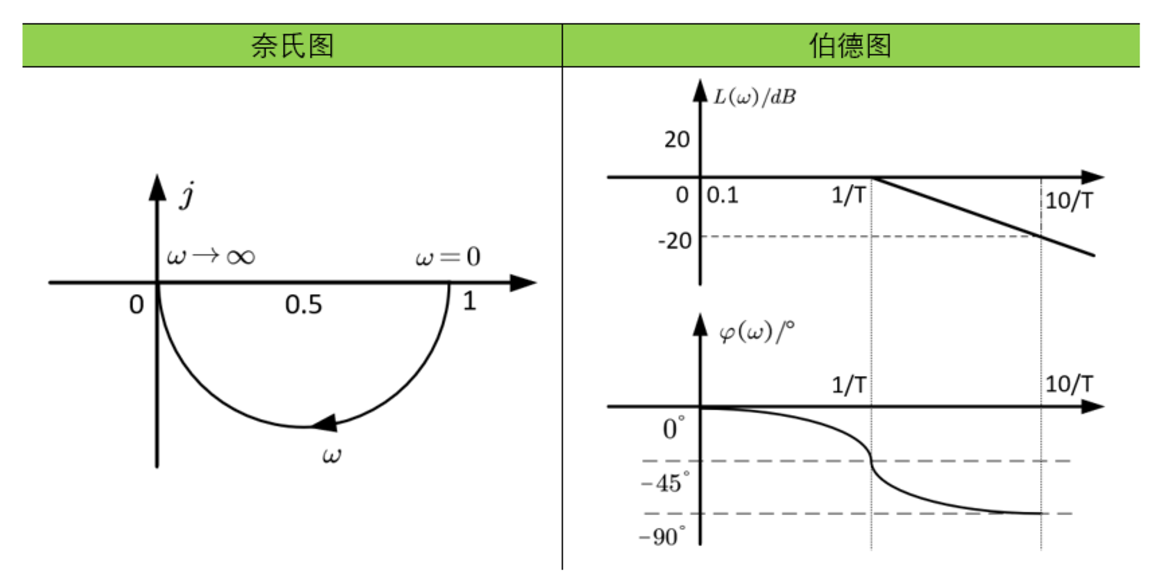
惯性环节
惯性环节的奈奎斯特图是一个半圆(数学上可证明)。在伯德图中,转折频率之后的对数幅频特性为一条$[-20]$斜率的直线(近似,实际上在转折频率处衰减了3dB)。相角变化从0°到-90°。
一阶微分环节
一阶微分环节的输出量取决于其输入量及一阶微分。它的奈奎斯特图相当于微分环节的图像向右平移了一个单位。它的对数频率特性与惯性环节相差一个负号,所以它们的对数频率特性关于横轴对称。
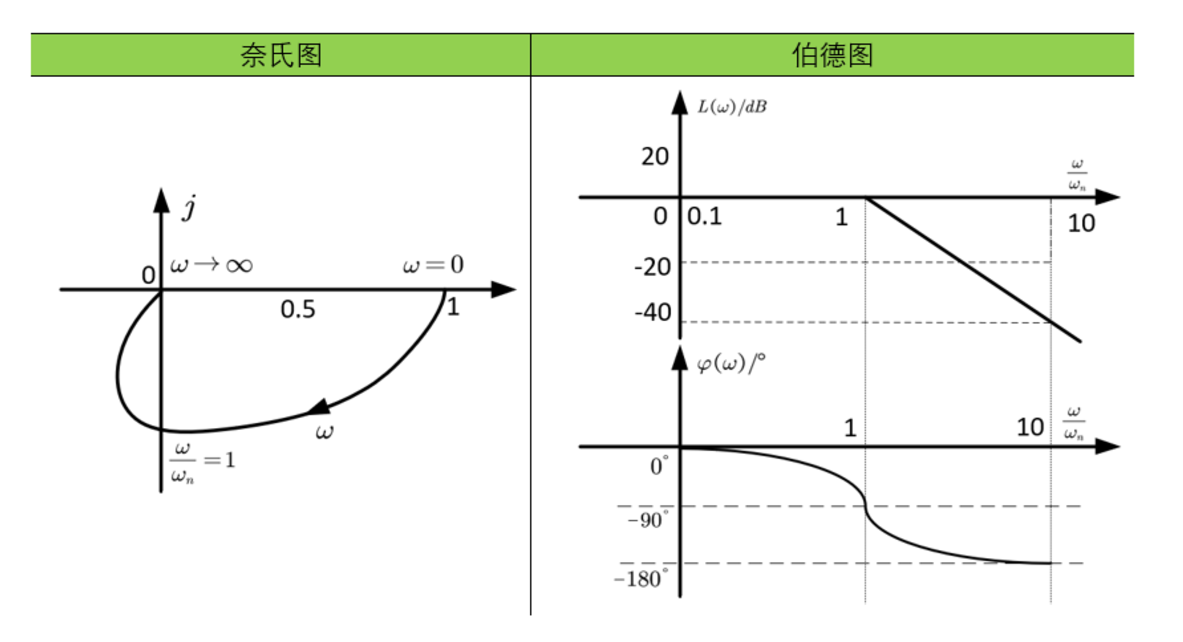
振荡环节
振荡环节的图像应该是由不同阻尼比的情况下组成的一簇曲线,它们的奈奎斯特图起于实轴1处的点,终于原点。转折频率后的模值以40dB的速度衰减。相角从0°变化到-180°。
稳定性分析
控制系统在任何足够小的初始偏移下,过渡过程随着时间的推移逐渐衰减为0,则为稳定系统
对典型系统求单位脉冲响应,对得到的时域表达式进行分析得到
闭环传递函数的极点全部都在$s$平面的左半平面
代数稳定判据
根据根与系数的关系,可以得到劳斯阵列
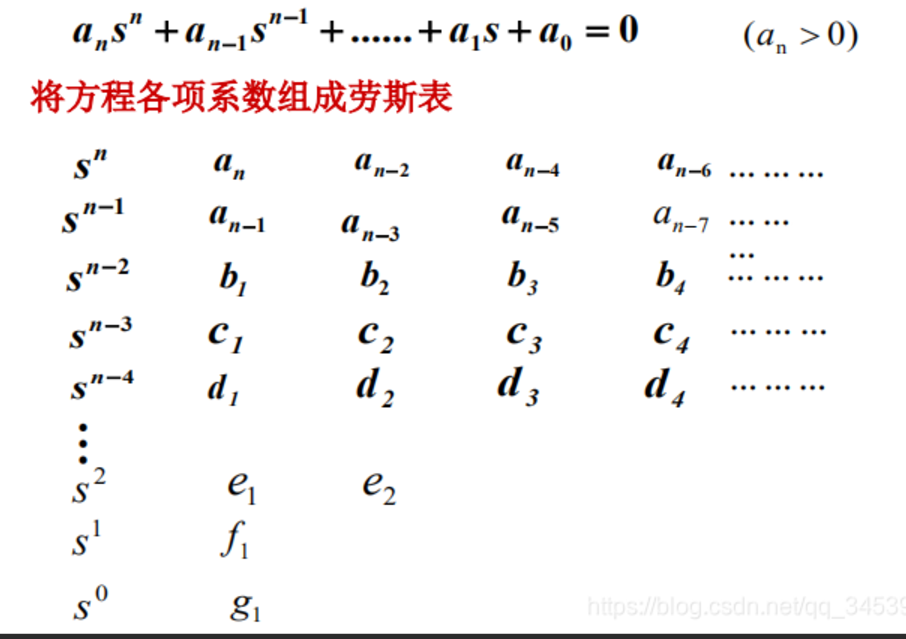
其中有递推公式
若计算得到的第一列全为正数则稳定,否则符号变化几次就有几个根在左半平面
对于三阶多项式,可以得到
奈奎斯特判据
开环传递函数$G(s)H(s)$从$-\infty j\to \infty j$包围$(-1,j0)$点的圈数
$G(s)H(s)$是实系数有理分式函数,由于对称性,一般只绘制$0\to \infty j$的图线
R=P-Z
辐角原理,参考
https://blog.csdn.net/weixin_46664967/article/details/113208585
$F(s)$绕平面原点的圈数只和$F(s)$被闭合曲线$ Γ$(取成整个右半平面) 包围$F(s)$的零点和极点的代数和有关
R:R等于$ΓGH $逆时针包围F(s)平面上点 $(-1 , j0)$的圈数
P:开环传递函数在右半平面内的极点数,P是已知的
Z:闭环传递函数在右半平面内的极点数,若Z = 0 系统稳定
通过平移即可得到
步骤
作出开环系统的奈奎斯特曲线
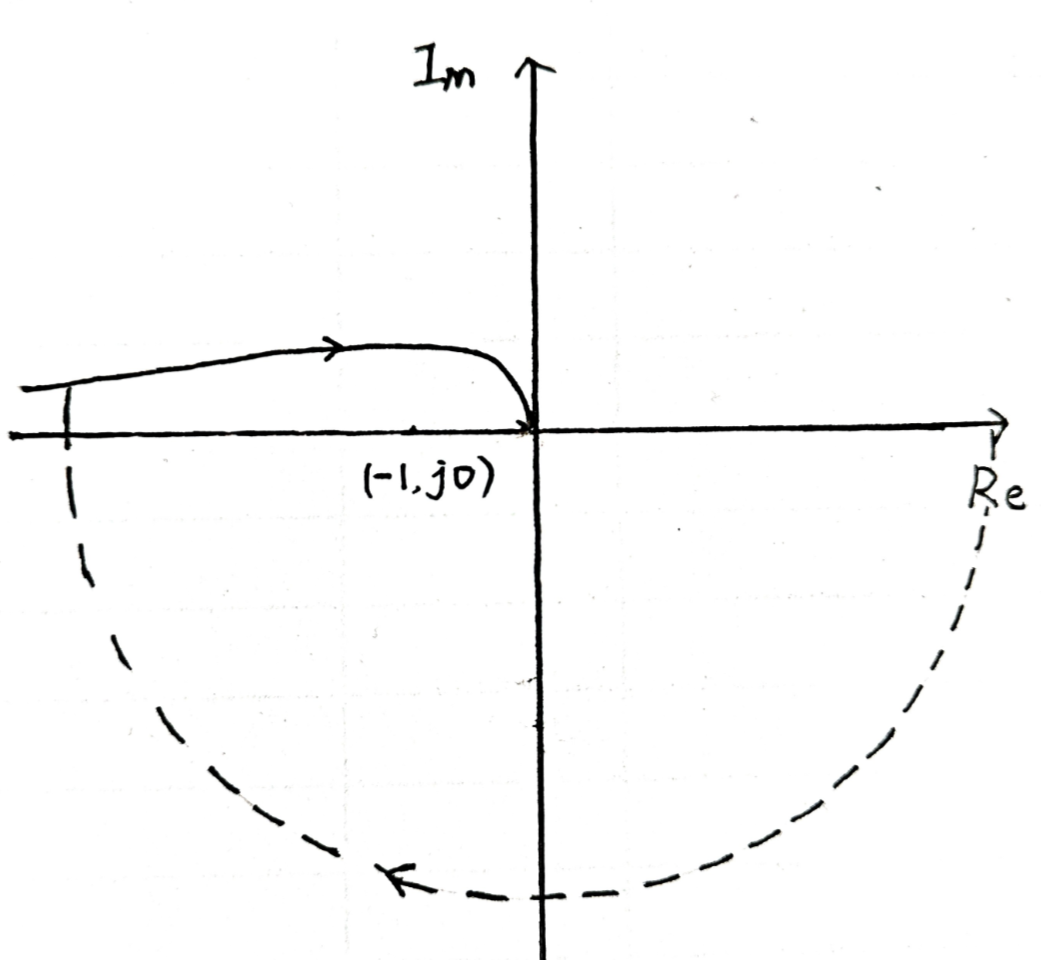
若不完整需要补圆
若有$(1/s)^v$项,则以奈奎斯特曲线的起始位置为起点,逆时针画 $v\times 90°$ 半径无穷大的圆弧,但该圆弧的方向为顺时针
在 (-1,j0) 左侧 正穿越 的次数 (从上往下) ,N-为¥左侧 负穿越的次数 (从下往上)
R 表示开环系统 G(s)H(s) 逆时针绕点(-1,j0)的圈数,等价于1+G(s)H(s) 顺时针绕原点的圈数
N+ 表示点 (-1,j0) 左侧正穿越的次数(从上向下穿越)
N- 表示 点 (-1,j0) 左侧负穿越的次数(从下向上穿越)
只看左侧
P为开环传递函数在右半平面极点数
误差分析
理想输出和实际输出量之差为误差$e(t)$,象函数为$E(s)$,误差信号的稳态分量(静态误差),记作$e_{\text{ss}}$
输入信号和反馈信号比较后的信号$\varepsilon (t)$称为偏差
考虑偏差趋近于0,理想输出传递回来偏差为0,故
故
输入引起的稳态分析
对于单位反馈系统,误差等于偏差
所以误差传递函数为
根据终值定理
对于非单位反馈系统
稳态偏差为
一般$H(s)$为常数,故
静态误差系数
对于单位阶跃响应
稳态偏差为
可以定义静态误差系数为
对于$0$型而言
对于高于$\rm I$型的系统,分母$s\to 0$
静态速度加速度误差系数
对于单位斜坡输入
同理对于单位加速度输入,也有静态加速度系数
总结如下表
| 系统类别 | 单位阶跃 | 等速输入 | 等加速输入 |
|---|---|---|---|
| 0型系统 | $\frac1{1+K}$ | $\infty$ | $\infty$ |
| I型系统 | $0$ | $\frac1K$ | $\infty$ |
| II型系统 | $0$ | $0$ | $\frac1K$ |
干扰引起的误差
忽略输入,只计算干扰
之后可以用叠加原理计算总误差