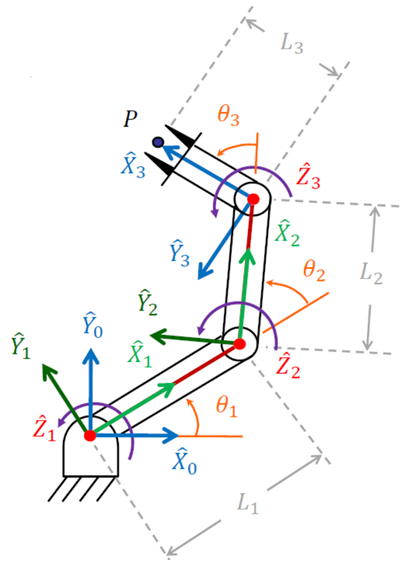
大二/机器人/数学 Posted on 2023-11-15 四元数定义$\psi$, $\theta$, $\phi$分别为绕Z轴、Y轴、X轴的旋转角度 称为欧拉角 欧拉角转四元数 四元数旋转公式 复合性质 DH5dof3dof机械臂 雅可比矩阵